Batter-Relative Real-Time Timing Cue System: Pilot Validation of Algorithm Efficacy
Copyright © 2026 X Factor Technology. All rights reserved.
Ken Cherryhomes and Stacy Silvernail
Note: This is not a behavioral training study, retention trial, or RCT with control groups. It is a systems-validation pilot conducted to evaluate the efficacy of the deterministic cueing algorithms, the late-stage reduced-recalibration pathway and the operational validity of the inter-hitter relative coordinate system under controlled conditions. Hitters are strictly operators providing collision-level feedback for algorithmic testing.
These trials also introduced the creation and first use case of the Causal Analytics metric Collision Geometry Deviation (CGD) for batting evaluation and algorithmic validation.
The invariant anatomical anchor referenced in the tested coordinate system is patent-pending and is therefore described only at a functional level. All other systems and methods described in this paper are proprietary to X Factor Technology and are protected by granted U.S. Pat. Nos. 10,987,567, 10,994,187, and 11,596,852.
Abstract
This pilot study tested whether a prototype closed-loop timing system could compute and issue usable real-time swing cues under live pitch conditions. The study evaluated the functional performance of the system’s hardware stack and cueing algorithms. It also tested a second algorithm introduced in late-stage trials that eliminated system recalibration and operator retesting when pitch location changes were introduced. In addition, the study tested a novel inter-hitter relative coordinate system designed to provide invariant comparability across hitters.
Six operators participated across three testing sessions under controlled machine-pitch conditions, generating repeated live swing events for system evaluation. For each trial, the platform used hitter-specific Time to Impact values and the inter-hitter relative coordinate framework to compute swing-initiation cues for intended interception targets across pitch locations.
Outcomes were assessed at the collision level using a geometry-based scoring framework rather than conventional result-based measures alone. Results supported proof-of-function under pilot conditions. The system successfully generated and delivered usable real-time cues within the temporal limits imposed by pitch flight, and cue-guided swings produced collision responses commensurate with intended targets across tested locations.
Findings also supported the late-stage algorithm’s ability to eliminate recalibration and operator retesting across location changes, as well as the operational validity of the inter-hitter relative coordinate system.
Together, these results establish pilot support for the hardware stack, the algorithmic framework, and the coordinate model, and provide a basis for future work on retention, transfer, and broader training and analytic applications.
By translating interception timing into a closed-loop computational problem, this pilot is not merely offering another training refinement, it is exposing the incompleteness of the conventional model itself.
Introduction
Purpose of the Study
The purpose of this pilot study was to evaluate whether a prototype closed-loop timing system could function under live pitch conditions as intended. More specifically, the study tested the efficacy of the hardware stack, the deterministic cueing algorithms, a late-stage reduced-recalibration pathway designed to eliminate full recapture and operator retesting when pitch location changed, and a novel inter-hitter relative coordinate system designed to preserve invariant target meaning across operators.
The purpose was not to evaluate hitters as subjects of behavioral change, nor to test long-term retention, transfer, or population-level training effects. The hitters participated as operators whose repeated responses under live pitch conditions made it possible to determine whether the system could compute and issue usable timing cues and whether those cues produced collision behavior commensurate with predefined interception targets.
Thesis
This pilot tests the proposition that swing timing can be treated as a computable control problem under live pitch conditions. Specifically, it tests whether deterministic cue timing, derived from measured pitch kinematics and stored hitter-specific Time to Impact values, can constrain swing initiation to intended interception targets and be validated at the collision level.
System Overview
The system is a prototype real-time swing timing guidance platform. Its purpose is to compute and deliver a deterministic swing-initiation cue that corresponds to an intended collision state for a given pitch, using measured pitch kinematics and an individualized swing-time profile for the operator.
At a high level, the system operates as a closed-loop timing intervention:
- A pitch event is initiated under controlled conditions.
- Pitch kinematics are captured in real time over a fixed travel distance to estimate effective pitch velocity and time-to-arrival.
- The operator’s swing-time profile is represented by time-based metrics, yielding Time to Impact (TTI) for defined interception targets.
- The cueing engine computes the cue time as the difference between pitch time-to-arrival and the operator’s required initiation time for the intended interception target.
- A cue is delivered using a selected modality, and the swing event is captured for post-event validation.
Cue modalities
The system supports audio, visual, and haptic cueing. In pre-pilot swing capture testing, audio cueing was selected as the primary modality due to operator preference and practical observability of cue issuance during trials and in post session video review. In this protocol, the cue serves as the system-derived initiation signal produced by the timing algorithm. The operator is instructed to initiate the swing on the cue, which operates as a proxy for a released pitch.
Prototype hardware stack
The pilot implementation used a measurement stack designed to capture pitch timing and velocity, capture swing-time metrics, then execute cue issuance with sufficient fidelity to support deterministic cue computation. The system was iteratively calibrated and refined during pilot testing.
Secondary algorithm
In addition to the primary cue computation pathway, a secondary algorithm was evaluated during pilot testing. Its purpose was to eliminate recalibration when pitch location changes and to eliminate the necessity of batter retesting. In this paper, the secondary algorithm is described at a functional level and evaluated by whether cue timing and collision correctness remain stable when pitch location is changed without repeating the full recalibration process.
Coordinate system
In addition to the cueing algorithms, the pilot also evaluated an inter-hitter relative coordinate system designed to preserve target meaning across operators and pitch locations. In this system, interception targets were defined relative to the hitter by means of an invariant anatomical reference tied to a Keystone Swing Moment, defined as a 0 ° barrel orientation, so that cue computation and collision evaluation could be grounded in the same functional structure across trials and operators. Its purpose in the pilot was to preserve inter-hitter comparability, maintain stable target definition when pitch location changed, and support evaluation of intended collision states without altering their underlying meaning across different operators.
What the system does not do
The system does not prescribe an optimal swing path or provide mechanical instruction. It is intentionally swing-philosophy agnostic. Its timing cues are compatible with any swing model because they operate on time-domain constraints and a cross-compatible collision geometry definition. The intended collision state is defined by pitch location and collision depth, with associated barrel-orientation expectations, independent of how the hitter arrives at that collision state. The system’s function is timing, computing and delivering precise swing-initiation cues based on individualized swing-time measurements and pitch kinematics.
Methods
Testing overview
The methods below describe the test environment, instrumentation, protocol structure, endpoints, and the late-stage additions used to evaluate reduced-recalibration cueing and collision geometry scoring.
Test environment and operators
Testing was performed in a controlled hitting environment selected to produce repeatable pitch delivery, selectable pitch locations, and stable measurement conditions. Hitters participated as operators to generate repeated swing events required for system validation. The unit under test was the system, not the operators.
Instrumentation
A prototype measurement stack was used to support closed-loop cue computation and verification. The stack captured:
- Operator swing-time to Keystone Swing Moment
- Pitch kinematics
- Cue issuance occurrence for later review
Calibration checks were performed throughout testing. Refinements were introduced when error sources were identified.
Proto-type swing time capture system
A proto-type IMU based swing capture device (hardware) and cue issuance system (software) were used as the primary swing-time reference during testing. In this protocol, the cue served as a proxy for pitch release to preserve the initiator-responder structure of the event. Swing times were captured at a standardized Keystone Swing Moment referenced to an invariant anatomical anchor, so the stored timing reference retained consistent meaning hitter to hitter. This was necessary because fixed release-distance parameters do not map cleanly across hitters without a stable, hitter-relative reference frame.
The system captured swing-time metrics required for live pitched ball cue computation and validation, including:
- Mechanical swing time, defined by a start event and an end event associated with the swing execution interval and contact window.
- Adjusted reaction time, defined as the pre-launch timing component composed of motor response delay time and additional mechanical latency that may occur after swing decision but before swing launch. This includes delays such as hitches, leaks, and other time-consuming mechanical behaviors not captured by the IMU once the swing execution interval begins. It is important to note adjusted reaction time does not include the load phase of the swing process. It is limited to measuring post decision-to-swing delays, cognitive or mechanical.
- Time to Impact (TTI), computed as adjusted reaction time plus mechanical swing time for a defined interception demand. This metric defines the complete decision-to-swing to collision with the ball time interval.
The same swing-capture data were also used to algorithmically derive individualized collision point maps spanning the full 25-collision points within the hitting zone, referenced to the invariant anatomical anchor. These maps incorporate contact-depth states, barrel orientation, and corresponding time-to-contact estimates. They enable location-specific timing targets and post-test analysis across the zone without requiring a full recapture, recalibration, or batter retesting cycle each time pitch location is changed.
Proto-type pitch capture system
A proto-type pitch-capture hardware system composed of a pair of light gates and processor device was used to capture live pitch velocity within two feet of pitch release. Pitch velocity was determined by timing the ball over fixed, predetermined travel distances. These distances were predefined from pitch release to the selected pitch location within the collision point and collision depth matrix. From the live velocity measurement, the system computed pitch time-to-target for the predetermined interception point. The time-to-target computation incorporated an aerodynamic drag coefficient term to account for air resistance over the measured flight distance. This time-to-target was the live pitch term used in deterministic cue computation and issuance. Pitch velocity measurements were cross-checked against a Stalker Sport 2 radar device and were found to be accurate within +/- 1 mph.
Cueing engine and cue delivery hardware
A dedicated cueing subsystem was used to execute real-time cue issuance. For each operator and tested condition, the system referenced the operator’s stored TTI profile for the selected hitting location target, including the intended contact-depth state within the pitch tunnel. During each pitch event, the system captured the live ball’s kinematics to the target zone and computed the cue moment required to synchronize swing initiation with interception at the predetermined target.
For validation, the cue was an audible tone emitted through a speaker system so operators and technicians could hear it in real time and so it could be detected during video review of the sessions.
During pitching-machine synchronization rounds, cueing was disabled and timing cues were not issued. Cueing was enabled only after the operator demonstrated stable synchronization to feeder rhythm and pitching machine release characteristics.
Closed-loop computation and reference frame
Cue computation followed a closed-loop timing model: pitch time-to-target was determined from measured pitch kinematics, and the operator’s required initiation time for the intended collision state was determined from the stored swing-time profile. The cue was issued at the computed moment that satisfies interception at the predetermined target.
Because in order to create cue-guided collision accuracy, the system depends on a stable reference frame, the pilot also tested a hitter-relative coordinate system designed to close the timing loop at the collision level. It did that by deriving the collision reference framework by following the hitter’s established swing arc geometry from the Keystone Swing Moment. Within that framework, collision depth was defined relative to an invariant anatomical anchor, so the collision map traveled with the hitter regardless of stance position in the box, enabling consistent interpretation of depth across pitch locations.
Collision depth became inter-hitter compatible because of the invariant anatomical anchor system, and the testing supported this by proxy because deterministic cueing remained functional across operators while referencing the same 25-point collision map, with only the operator-specific timing profiles varying by individualized timestamps.
Pilot protocol and conditions
Testing was performed across multiple sessions consisting of repeated pitch events under defined conditions. Pitches were delivered in a narrow velocity band of approximately 90 to 92 miles per hour from a standardized release distance of 55-feet for the middle location target, with inside and outside locations established as offsets from the middle location. Pitch height was delivered at either belt height or thigh height, depending on the session, operator and machine calibration.
For each condition, swings were collected with the cueing system operational. Deterministic cues were computed from captured pitch timing and each operator’s stored swing-time profile. Trials were organized by pitch location within a defined hitting zone used for testing and by predetermined hitting location targets selected for interception.
An additional algorithm was evaluated that reduced or eliminated system recalibration requirements when pitch location targets were changed. This evaluation was conducted by changing pitch location targets without repeating the full recalibration process and assessing whether cue timing stability and collision correctness remained consistent across location changes.
Collision point mapping and collision geometry expectations
To validate that the system solved the intended collision problem, collision outcomes were evaluated using a geometry-based scoring method. Because outcome-based measures can mask whether the collision problem was solved, an execution-level scoring layer was developed during pilot testing.
A geometry-based scoring method quantified deviation from collision geometry dictated by pitch location and intended collision-depth and barrel orientation state. Scoring was based on adherence to three factors: expected collision depth, barrel orientation, and spray direction commensurate with pitch location. Measurement was quantified as Euclidean distance between the executed collision state and the standardized mapping expectations.
Spray direction was evaluated using five discrete directional bins. Each bin was defined with an angular tolerance of plus or minus 9 degrees around its nominal direction. Contact events were classified to a bin when the observed spray angle fell within that tolerance window.
At this level of evaluation, swings and misses were not included and launch angles were ignored. The rationale was that neither provided a direct, quantifiable reflection of cue computation integrity or cue issuance integrity. Launch angle, in particular, is driven by bat–ball offset and contact mechanics, not necessarily by timing accuracy, which was the objective of the system and the intent of the trials.
Each contact event was classified into a hit-type bucket and assigned a penalty score using five categories with fixed penalties: Optimal (0), Very Good (2), Good (4), Fair (7), and Poor (10). This penalty-based geometry scoring method later became the Causal Analytics base-level metric, Collision Geometry Deviation (CGD).
Primary endpoints
Endpoints were selected to test system efficacy, algorithm integrity, and protocol viability:
- Timing validity and repeatability: stability of cue computation and cue issuance behavior relative to measured pitch timing.
- Collision correctness: frequency of collision solutions consistent with the intended interception targets across pitch locations and collision-depth states, evaluated using the geometry-based scoring method.
Analysis approach
Results are reported as cue timing behavior relative to measured pitch timing and collision-geometry scoring outcomes across pitch locations and collision-depth states.
System Testing
Pilot testing occurred across three, multi-round sessions spanning six-weeks.
Operators and attendance
A total of 6 operators participated over 3 sessions of multi-round testing. Attendance varied by operator across sessions with two primary operators attending all trials sessions.
Operator Identification Codes
The letter code represents the operator’s first initial. The first two numbers represent the operator in numeric code. The second set of numbers, preceded by a dash represents the session number, e.g., for G01-01, the G represents the first initial of the operator, 01 represents the operator numerically and -01 represents the session number. When describing the operator in summaries, only the letter and numeric code are used, e.g., G01.
Session structure
Each session consisted of multiple rounds of swings per operator. The number of swings per operator and rounds varied from session to session. Each session began with swing-time capture to establish baseline benchmarks for that day.
A. Session One
The first session emphasized middle-location pitches to validate baseline system function and to acclimate hitters to treating the cue as the timing signal rather than defaulting to internal timing priors.
B. Session Two
The second session expanded location demands. Middle-location pitches were used to re-establish baseline timing, then inside and outside pitches were introduced in subsequent rounds.
During this session, further system experimentation was conducted. An opportunistic 12-year-old operator was invited to test the system. His prior experience was limited to maximum pitch velocity references of up to 65-mph. He completed three rounds of testing with pitch velocities in the 90-mph range.
C. Session Three
The third session consisted of two rounds of inside-location pitches, finishing with a randomized four-pitch round containing two inside pitches, one outside pitch, and one middle pitch. Two inside pitches were thrown consecutively to calibrate attention to the inside tunnel. An outside pitch then tested transition without remaining locked to the prior calibration state. The sequence finished with a middle pitch.
During this session, an additional test was conducted on an operator whose Time to Impact (TTI) exceeded the available time window at 90-mph due to a pre-launch swing flaw. The objective was to test whether a tenable cue, issued within the available window, could be used as a synthetic Bayesian prior for the operator to chase, effectively “bumping” swing initiation timing into a usable range rather than requiring the operator to self-establish a timing reference under conditions that exceeded his current time affordance.
Testing
Session One
Session One served as the baseline test of cue-guided collision behavior under repeated B3 conditions at approximately 90 to 92 mph. Across the session, the system produced usable collision behavior in all three operators, but with substantial early variability. Group-level results improved across the first three rounds, with Optimal or Very Good outcomes increasing from 5 of 11 scored contacts, 45.5%, in Round One, to 6 of 18, 33.3%, in Round Two, and then to 9 of 13, 69.2%, in Round Three. Round Three therefore provided the clearest group-level confirmation within Session One.
Among the primary operators, G01 showed operational but unstable baseline performance across four rounds. He produced 19 scored contacts in 29 pitch events, with an average CGD of 5.05 and 9 of 19 scored contacts, 47.4%, graded Optimal or Very Good. His round-level CGD values were 5.00, 6.67, 5.33, and 3.75, indicating substantial scatter early in the session followed by improvement in the final round, but not full stabilization.
C02 produced the strongest overall Session One baseline among the repeated primary operators. Across three rounds, he recorded 15 scored contacts in 18 pitch events, with an average CGD of 3.87 and 7 of 15 scored contacts, 46.7%, graded Optimal or Very Good. His round-level CGD pattern moved from 3.50 in Round One to 6.33 in Round Two, then improved sharply to 1.20 in Round Three, indicating that cue-guided collision behavior became markedly more commensurate by the end of the session under the same repeated B3 demand.
T03 provided the most informative within-session progression among the additional operators. Across three rounds, he produced 16 scored contacts in 17 pitch events, with an average CGD of 4.19 and 9 of 16 scored contacts, 56.3%, graded Optimal or Very Good. His round-level CGD improved from 6.40 in Round One to 4.83 in Round Two and 1.20 in Round Three. This progression showed that cue-guided collision behavior was not limited to G01 and C02 and that repeated B3 exposure could produce marked within-session stabilization toward the intended collision solution in an additional operator.
Taken together, Session One established that the system was already operational under repeated middle-location conditions, but that early-round variability remained substantial. The clearest evidence was the improvement in group-level round quality by Round Three and the parallel within-session improvement observed in C02 and T03. G01 also improved later in the session, although his baseline remained more variable overall.
Session Two
Session Two extended testing beyond the repeated middle-location baseline of Session One and served as the primary evaluation of changed-location performance. The session opened with a common middle-pitch reference round for all operators, then moved into location-specific and alternating-location demands. This structure allowed comparison of returning operators against prior baseline performance while also testing whether stored hitter profiles and the collision-point matrix remained operational when pitch location changed.
At the group level, Session Two provided the clearest session-level evidence that the system remained effective beyond fixed middle-location conditions. The strongest evidence came from the two primary operators, G01 and C02, both of whom produced substantially better overall collision behavior than in Session One once the session moved beyond the opening reference round. B04 provided a useful supporting case under less refined swing conditions, while K05 served as an exceptional operational case under a substantial prior-experience mismatch.
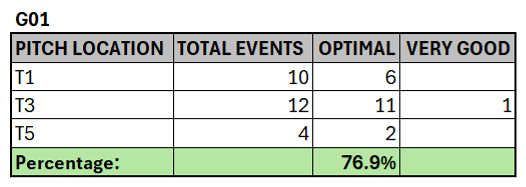
G01 produced 21 scored contacts in 22 pitch events across four rounds, with an overall average CGD of 2.05 and 16 of 21 scored contacts, 76.2%, graded Optimal or Very Good. He opened with a 2.00 average CGD in the fixed T3 reference round, improved to 0.00 under alternating T3 and T1 demand in Round Two, then recorded 2.71 and 3.50 in Rounds Three and Four. This pattern showed that collision quality not only held under changed-location demand, but remained highly commensurate across alternating thigh-middle and thigh-inside targets.
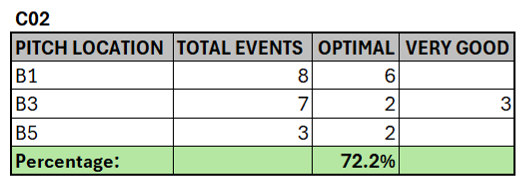
C02 produced 17 scored contacts in 18 pitch events across four rounds, with an overall average CGD of 2.53 and 13 of 17 scored contacts, 76.5%, graded Optimal or Very Good. His session was especially informative because it began with a weak fixed-B3 opening round, average CGD 6.40, then improved sharply once the session moved into changed outer zone demands. His CGD values fell to 0.67 in Round Two, 0.50 in Round Three, and remained strong at 1.40 in Round Four. That pattern showed that his weakest performance occurred in the shared opening recalibration condition, while his strongest work appeared once location demands changed.
B04 produced 20 scored contacts in 21 pitch events across three rounds, with an overall average CGD of 4.13 and 11 of 20 scored contacts, 55.0%, graded Optimal or Very Good. His round structure was informative. He opened at B3 with an average CGD of 4.50, improved to 3.71 at B1, then regressed to 6.00 when returned to B3. This pattern suggested that cue guidance remained operational, but that his more pull-oriented default swing behavior continued to influence collision geometry, particularly when the intended middle-location solution was less compatible with that pattern.
K05 should be treated as an exceptional operational case rather than a direct comparison operator. Across three rounds, he produced 13 scored contacts in 19 pitch events, with 6 unscored events and a session average CGD of 4.69. The importance of the case was not the summary average alone, but that a 12-year-old operator with prior pitch exposure around 65 mph still produced usable cue-guided collision behavior under an approximately 90 mph session condition. His Round One began under the same middle-pitch B5 structure as the rest of the group before being shifted to outside pitches at B5 for safety reasons, and the system remained operational after that adjustment.
Taken together, Session Two showed that the system was not limited to repeated middle-location success. After a shared opening reference round, the primary operators produced strongly commensurate collision behavior under changed-location demands, supporting the efficacy of the stored hitter profiles, the collision-point matrix, and the reduced-recalibration pathway. B04 showed that the system remained usable even when the operator’s default movement pattern limited full alignment with the intended collision solution, while K05 showed that cue-guided operational success was still obtainable under an extreme prior-experience mismatch.
Session Three
Session Three provided the strongest confirmation of the system under the most demanding conditions of the pilot. The first two rounds tested repeated inside-location performance for the two primary operators, while also including W06 under a constrained timing condition at B3. The final round was a short randomized sequence for G01 designed to test whether cue-guided collision behavior could be redirected across abrupt location changes without recalibration. Taken together, the session tested sustained correctness under repeated inside demands, adaptive improvement in a constrained timing case, and redirection under deliberate location switching.
G01 produced the strongest performance of the study in Session Three. Across three rounds, he recorded 16 scored contacts in 16 pitch events, all graded Optimal, for a session average CGD of 0.00. He first produced perfect results under repeated T1 demand in Round One, then sustained the same result across a larger sample in Round Two. In the final four-pitch randomized (to the hitter) sequence, consisting of two inside pitches followed by one outside and one middle pitch, he again produced four Optimal contacts with no degradation in collision correctness. This pattern showed not only repeated inside-location correctness, but successful redirection across abrupt spatial changes without fresh recalibration.
C02 likewise produced his strongest performance of the study in Session Three. Across two rounds at B1, he recorded 9 scored contacts, all Optimal, for a session average CGD of 0.00 across scored events. In Round One he also produced two unscored foul balls, but all scored contacts were correct. He then sustained the same complete correctness in Round Two across a larger sample. As with G01, Session Three represented full consolidation relative to his more variable earlier-session results.
W06 should be treated as an analytically distinct constrained case rather than a direct comparison operator. His importance in Session Three was the round-to-round change under altered cue timing. In Round One, because his Time to Impact exceeded the available time window under the session pitch condition, cues were issued from immediate release as a synthetic prior. Under that condition, he produced an average CGD of 5.83. In Round Two, cue timing was shifted to a predetermined TTI of 0.385 s, and his average CGD improved to 2.86. The practical importance of this change was not the summary average alone, but the shift in collision distribution. In Round One, only 1 of 6 scored contacts was Optimal. In Round Two, 5 of 7 scored contacts, 71.4%, were Optimal. This showed that when the timing burden was made more tenable, collision performance improved materially within the same session.
Taken as a whole, Session Three provided the strongest combined confirmation in the pilot. G01 and C02 both demonstrated complete correctness under repeated inside-location demand, while G01 also maintained that correctness in the randomized location-switching sequence. W06 provided a distinct but equally important operational result, showing that altered cue timing could materially improve collision performance when an operator’s baseline timing burden exceeded the available interception window. For that reason, Session Three served as the clearest combined confirmation of sustained cue-guided correctness, adaptive timing support, and behavioral flexibility under changing spatial demands.
Interpretive Framework
The findings are consistent with a timing-first view of the hitting task. In an interception event, collision timing functions as the first-order constraint. When that constraint is sufficiently solved, movement organization can proceed under more tenable conditions. In that sense, the cue did not provide a mechanical solution. It provided temporal guidance that constrained initiation timing toward the intended collision state while preserving the hitter as the active operator in the event. The exceptional cases further suggest that once the timing burden was reduced to a usable range, more organized collision behavior became possible without explicit mechanical instruction.
Primary Findings
The primary finding of this pilot was that the system successfully computed and issued usable deterministic swing-initiation cues under live pitch conditions from stored hitter-specific Time to Impact values and live pitch measurements. Those cues produced collision responses commensurate with intended interception targets, supporting the central function under test.
Across the repeated primary-operator sessions, stored Keystone Swing Moment timing profiles remained essentially stable while collision performance improved substantially. That distinction is important. It indicates that the improved collision outcomes were not primarily explained by changing stored timing profiles, but by the efficacy of the cueing process applied from those stored values under live pitch conditions.
A second finding was that the stored hitter profile and collision point matrix remained operational when pitch location changed, permitting usable cue-guided collision behavior across multiple targets without full recapture at each new location.
A third finding was that validation was established at the collision level rather than through conventional outcome measures alone. Successful contact was not treated as sufficient evidence of correct timing by itself. Collision success was evaluated according to whether contact depth, barrel-orientation state, and directional geometry were commensurate with the intended interception target.
A fourth finding was that the inter-hitter relative coordinate system remained operational across different operators while preserving target meaning and individualized timing values within the same functional structure.
Taken together, these findings support the proposition that swing timing can be treated as a computable control problem and validated at the collision level under live pitch conditions.
Collision Point Matrix and Reduced-Recalibration Performance
A second major objective was to determine whether the stored hitter profile and collision point matrix could support location changes without full recapture at each target. The Session Two and Session Three results for the primary operators provide the clearest evidence on that point.
For G01 across Sessions Two and Three, the system produced 26 scored contact events across T1, T3, and T5, with an overall mean CGD of 1.03. At T3, 12 scored contacts produced 11 Optimal and 1 Very Good result. At T1, 6 of 10 scored contacts were Optimal. At T5, 2 of 4 scored contacts were Optimal.
For C02 in Session Two, the system produced 18 scored contact events across B1, B3, and B5, with an overall mean CGD of 2.53. At B1, 6 of 8 scored contacts were Optimal. At B3, 2 of 7 were Optimal and 3 of 7 were Very Good. At B5, 2 of 3 were Optimal.
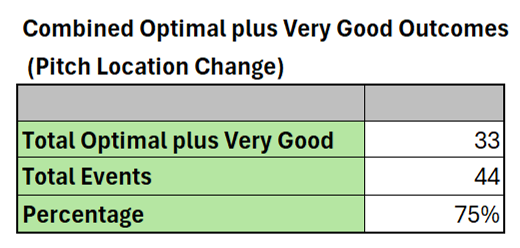
Across both primary operators combined, 33 of 44 scored contacts, 75.0%, were graded Optimal or Very Good across changed target locations without full recalibration. These results support the operational efficacy of the collision point matrix and the reduced-recalibration pathway under the conditions tested.
For C02 in Session Two, the system produced 18 scored contact events across B1, B3, and B5, with an overall mean CGD of 2.53. At B1, 6 of 8 scored contacts were Optimal. At B3, 2 of 7 were Optimal and 3 of 7 were Very Good. At B5, 2 of 3 were Optimal.
Across both primary operators combined, 33 of 44 Session Two and three scored contacts, 75%, were graded Optimal or Very Good despite changing locations without full recalibration. That result supports the efficacy of the collision point matrix and the reduced-recalibration algorithm.
Inter-Hitter Compatibility of the Coordinate System
Another central aim of the pilot was to test whether the hitter-relative coordinate system could preserve target meaning across operators while retaining individualized timing values. The repeated primary-operator data support that claim. Because collision depth was defined relative to an invariant anatomical reference and the Keystone Swing Moment, the same collision framework remained applicable across operators despite differences in anatomy, stance, setup, collision depth at keystone swing moment and batter’s-box position. This supports the operational validity of the coordinate system under the tested conditions.
Additional Operational Cases
Two exceptional cases produced observations relevant to the thesis but were analytically distinct from the repeated primary-operator findings.
K05 was an opportunistic 12-year-old operator with prior pitch exposure of approximately 65 mph tested under an approximately 90 mph session condition. Across three rounds, he produced a session average CGD of 4.69. The significance of the case was not the summary average alone, but that usable cue-guided collision behavior was obtained despite a substantial prior-experience mismatch and age commensurate biomechanical swing immaturity. This indicates that an externally supplied timing reference can constrain the interception problem to a usable range even when the hitter lacks established priors for the tested velocity regime.
W06 presented a different constrained case. Because his baseline Time to Impact exceeded the available interception window under the session condition, cue timing was altered across rounds to test whether a more tenable synthetic prior would improve performance. His average CGD improved from 5.83 in Round One to 2.86 in Round Two. This showed that when the timing burden was reduced to a more tenable range, collision performance improved materially within the same session.
Measurement Integrity and Scoring Controls
During Session Three live pitch cue-active trials, captured mechanical swing times exhibited observable fluctuation despite cue timing consistency and commensurate collision responses. These fluctuations did not indicate instability in cue computation. Cue issuance was based on stored hitter timing data and algorithmic application of those values, not on continuous dependence on live-captured swing-time fluctuation. The live swing-time captures collected during testing were observational only and were not used as the basis for cue issuance or for evaluation of algorithm efficacy. The observed fluctuations arose from three distinct sources that were separated during review.
- Some fluctuation reflected hitter online control within the perception-action process. Operators interacted with the cue rather than behaving as passive actuators, applying real-time adjustments during execution while still initiating on the system-derived cue.
- False end-event readings occurred when contact was aligned such that impact vibration was minimal at the sensor, consistent with collision precisely aligned to the bat’s vibrational node. In those cases, the IMU did not register a realistic impact signature, and the swing end event was not concluded at true contact, producing an artificially extended mechanical swing-time capture.
- Additional false positives occurred due to device error, producing occasional incorrect event detections independent of actual swing execution.
IMU captured bat-orientation variables were also evaluated for potential use in subsequent swing quality scoring. Vertical Bat Angle (VBA) and Horizontal Bat Angle (HBA) readings were unstable across devices and could not be reconciled to a standard suitable for scoring. VBA was therefore excluded from geometry scoring.
For horizontal barrel orientation, exact HBA measurement was not required to evaluate system accuracy. Barrel orientation was instead inferred using a 2 to 1 half-angle reflection approach, which provided an efficient, practical orientation proxy for grading cue accuracy without dependence on unstable IMU-derived HBA values.
Collision depth was measured using a proprietary anchoring system and used as a cross-reference for collision-angle evaluation and algorithmic efficacy. This enabled collision-depth verification independent of IMU end-event anomalies and supported consistent collision-geometry scoring based on collision depth, inferred barrel orientation, and spray direction commensurate with pitch location. Accordingly, algorithm efficacy was evaluated at the level of collision outcome rather than by direct dependence on unstable IMU-derived orientation values.
Future Applications
The closed-loop structure tested here supports several downstream applications.
Cue-Based Errorless Timing Training
The system supports use as an errorless training modality across levels of play and stages of readiness. By reducing large temporal errors before collision rather than merely documenting them afterward, the cue creates a practice condition in which correct interception timing can be experienced more often and reinforced more efficiently. This has clear application for youth players who need timing guidance during deliberate training, for advanced hitters seeking recalibration, and for professionals preparing for a specific pitcher or attempting to recover timing quickly after layoffs. In that role, the system functions as a means of structuring deliberate practice around repeated access to correct temporal solutions, with direct implications for skill acquisition, retention, recalibration, and targeted preparation.
Retention and Consolidation-Rate Study
A fully developed follow-up study has also been proposed to test retention and the rate of accelerated timing-prior encoding under cue-based errorless training. Unlike the present pilot, which was designed to validate system efficacy of function, the proposed study would formally test whether precisely timed cues shorten acquisition time, accelerate the encoding of usable timing solutions, and improve retention after cue removal relative to conventional trial-and-error practice.
Inter-Hitter Relative Coordinate System
The study also tested a novel inter-hitter relative coordinate system that makes standardized comparison across hitters possible by preserving hitter-relative meaning at the point of collision. Because the system is anchored to an invariant anatomical reference and a Keystone Swing Moment rather than to a fixed geological reference (the plate), it makes inter-hitter comparisons of intercept depth possible using identical standardized collision maps that can be timestamped with individual swing time profiles.
Plate-based systems such as Statcast can compare external pitch location, but they cannot determine whether different hitters intercepted the ball at the same hitter-relative depth, because the same plate coordinates do not preserve the same geometric meaning across differences in body structure, stance, setup, or box depth. Even where hitter-specific anatomical references or proxies are used, such as center-of-mass-based positioning or hip-line approximations relative to a fixed geological reference point, inter-hitter comparability remains unstable because those references are subject to setup centerline differences and potential drift during the swing launch phase. As a result, the coordinate frame itself does not remain invariant enough to preserve equivalent intercept-depth meaning across hitters.
This coordinate structure opens the door to broader applications in collision evaluation, comparative player analysis, and geometry-based scoring. Once intercept depth is preserved in hitter-relative form, collision events can be compared across hitters on a common geometric basis rather than through outcome alone. That makes it possible to evaluate whether two hitters arrived at equivalent collision solutions even when their bodies, swing patterns, and spatial organization differ. It also provides the geometric foundation for future scoring models in which collision quality can be assessed relative to standardized hitter-relative maps rather than inferred only from external outcomes such as exit velocity, launch angle, or spray direction.
Contact-Point Mapping
Contact-point maps can be created as a time-stamped 25-point collision matrix. Rather than requiring capture at every location, the matrix can be extrapolated from a single-location swing time reference, the Keystone Swing Moment, and extended across the zone as a baseline for hitter-specific collision structure. At each point in the matrix, the system can define the required intercept depth, barrel position within the hitter-relative coordinate frame, barrel orientation, and TTI for the intended collision objective. The mapping is both standardized and situational. It provides a consistent geometric reference across the full zone while remaining individualized to the hitter’s profile, intended outcome, and tactical context. The matrix can also be remapped for hitter intent or situational demands when historical data indicate that the preferred collision objective should shift by pitch type, location, count, outcome intent, or game context. Once established, the map provides the profile structure used by downstream systems for evaluation, training design, predictive modeling, and longitudinal tracking.
Predictive and Prescriptive Modeling
Predictive and prescriptive modeling can be built on approach plans derived from outcome probability by pitch type, velocity, and location for an individual hitter. Those plans can be practiced with or without guidance using the same timing targets and collision expectations defined by the hitter’s profile. Swing cues, along with no-cue conditions representing take decisions, can be used to establish batter approach plans against specific pitchers, enabling game and series preparation based on hitter-specific outcome probabilities. Cue-guided practice can then be faded so the hitter can execute within the same approach structure without continuous assistance, allowing direct comparison between guided and unguided execution under equivalent temporal and collision objectives.
Video Analysis and Post-At-Bat Reconstruction
Video analysis can be enhanced when it is synchronized to time-domain events and evaluated with geometry-based deltas rather than interpreted post hoc. From time-indexed records of pitch kinematics along its flight path, post-at-bat analysis can reconstruct the pitch event, then close the event loop by identifying the optimal interception point for that pitch condition. The analysis can then quantify Euclidean distance between the optimal collision solution and the executed collision solution in feet, inches, and vertical & horizontal degrees.
A hitter profile provides defined points along the timeline, including decision point, motor attack point, and the timing profile of the event, enabling objective attribution of error to specific temporal segments and collision-geometry deviations across pitches.
VR and AR Implementations
VR and AR implementations can use the same computational backbone. Simulated pitch events can be defined by kinematics and tunnel geometry, then paired with real-time cue computation derived from the hitter’s stored timing profile and contact-point map. This supports repeatable training scenarios, algorithm regression testing, and controlled experiments that isolate timing constraints without introducing mechanical instruction bias.
Conclusions
This pilot study supported the efficacy of the primary cueing algorithms under live pitch conditions, the efficacy of the reduced-recalibration algorithm, and by proxy, the operational validity of the novel inter-hitter-relative coordinate system. Under the conditions tested, the system computed and issued usable deterministic timing cues from stored hitter-specific timing profiles and live pitch measurements, and those cues produced collision responses commensurate with intended interception targets. Within the validation framework of this pilot, sweet-spot contact alone was not sufficient to establish proof of function. Validation required that collision fall within the defined tolerance range for the intended interception target, including commensurate contact depth, barrel orientation, and directional geometry. The findings therefore support the central proposition of the study: swing timing can be treated as a computable control problem and validated at the collision level.
The exceptional cases also pointed to a broader functional principle. In K05, usable cue-guided collision behavior was obtained despite a substantial prior-experience mismatch to the tested pitch-velocity regime. In W06, collision performance improved when the temporal burden was reduced to a more tenable range. In neither case did the system provide mechanical instruction. Rather, both cases support the interpretation that when the first-order timing constraint is sufficiently solved or constrained, more effective movement organization can emerge without explicit mechanical prescription. This is consistent with a self-organizing view of the interception task and with Bernstein’s principle that movement organization is shaped by task constraints and operator intent.
That interpretation also supports the study’s timing-first position. If the temporal condition for intercept is not met, refinement of movement form has limited value because the collision problem has already been lost. Only once timing is brought into a usable range do second-order objectives such as outcome control, collision quality, and movement refinement become meaningfully available. In that sense, the pilot supports timing-first intervention over mechanics-first intervention in live interception training.
The findings are also consistent with Kahneman’s distinction between deliberative and automatic processing. The cue does not supply the movement solution. It reduces the higher-order burden associated with resolving when to initiate under severe temporal constraint, thereby creating the condition under which practiced movement solutions can organize and execute more effectively.
The study also supported the use of a novel inter-hitter-relative coordinate system. By anchoring collision depth to an invariant anatomical reference and the Keystone Swing Moment, the same pitch conditions, interception targets, and collision objectives could be applied across operators despite differences in anatomy, stance, setup, and batter’s-box position. Taken together, these findings establish proof of function for the tested system and support further research into retention and transferability under controlled conditions.